
Chapter 39: VS Code for C/C++ Cross-Compilation
Chapter Objectives
By the end of this chapter, you will be able to:
- Understand the role of an Integrated Development Environment (IDE) in a cross-compilation workflow.
- Configure Visual Studio Code (VS Code) with the necessary extensions for embedded C/C++ development.
- Set up IntelliSense to correctly parse code using a cross-compiler’s headers and libraries.
- Create and configure build tasks in VS Code to automate the cross-compilation process.
- Implement a remote debugging session, allowing you to debug code running on a Raspberry Pi 5 directly from your development machine.
- Apply these techniques to a practical hardware interaction project on the Raspberry Pi 5.
Introduction
We have primarily relied on the command line for compiling and managing our projects in our journey through embedded Linux development. While powerful and fundamental, this approach can become cumbersome for larger, more complex applications. The modern software development landscape, including the embedded systems domain, has been revolutionized by sophisticated Integrated Development Environments (IDEs). These tools go far beyond simple text editing, integrating code analysis, build automation, and debugging into a single, cohesive interface. Using an IDE is not about avoiding the command line, but about augmenting its power with features that dramatically improve productivity, reduce errors, and streamline the entire development lifecycle.
This chapter introduces the use of Visual Studio Code (VS Code), a highly popular, extensible, and powerful source-code editor, as a full-featured IDE for embedded Linux development. We will focus specifically on the critical task of cross-compilation, where we build software on a powerful host machine (like a desktop PC) for a different target architecture (our Raspberry Pi 5). You will learn how to transform VS Code from a simple text editor into an intelligent development hub. We will configure it to understand our cross-compilation toolchain, provide intelligent code completion (IntelliSense), automate builds with a single keystroke, and, most impressively, debug code running live on the Raspberry Pi 5 as if it were a local application. This chapter will bridge the gap between raw command-line compilation and a professional, efficient, and modern development workflow.
Technical Background
To fully appreciate the power of an IDE in an embedded context, we must first solidify our understanding of the foundational concepts: the cross-compilation toolchain and the architecture of a modern, extensible editor like VS Code. This section will explore the theory behind these components, explaining how they are configured to work in concert to create a seamless development experience.
The Essence of Cross-Compilation
At its heart, a compiler is a translator. It translates human-readable source code into machine-readable object code that a specific CPU architecture can execute. When you compile a program on your x86-64 desktop computer to run on that same computer, you are performing native compilation. The compiler, the code it produces, and the system running it all share the same architecture.
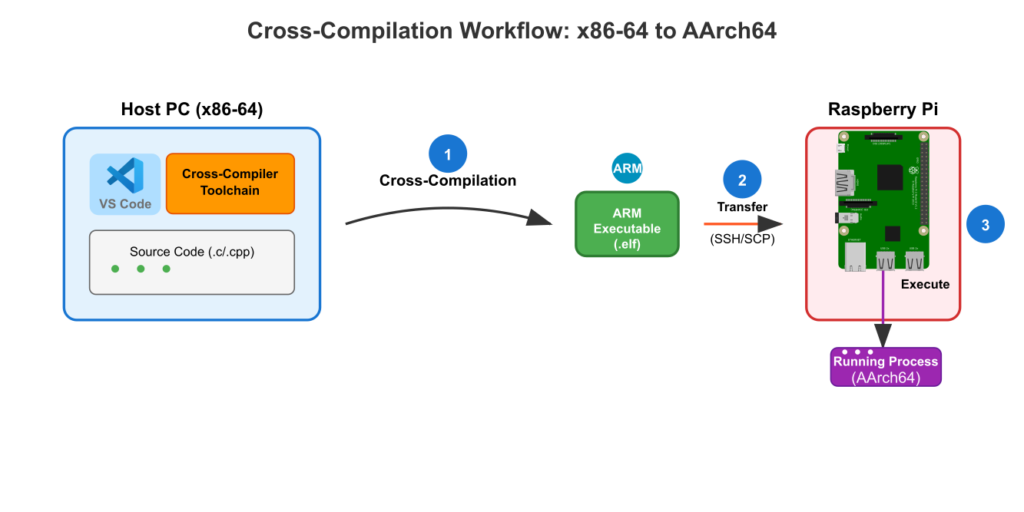
Embedded development, however, rarely affords this luxury. Our target, the Raspberry Pi 5, uses an ARM-based processor (specifically, a 64-bit Arm Cortex-A76). Our development host machine is likely an x86-64-based desktop or laptop. If we were to use the native GCC compiler on our x86-64 host, it would produce an executable file containing x86-64 machine instructions. Attempting to run this executable on the Raspberry Pi’s ARM processor would be like trying to play a Blu-ray disc in a CD player—the hardware simply does not understand the format.
This is where cross-compilation becomes essential. A cross-compiler is a special type of compiler that runs on one architecture (the host, e.g., x86-64) but generates object code for a different architecture (the target, e.g., AArch64 for the Raspberry Pi 5). This setup is standard practice in the embedded world for several compelling reasons. Host machines are typically far more powerful than the target embedded devices, possessing more CPU cores, memory, and faster storage. Compiling large projects like the Linux kernel or complex C++ applications on the target device itself (a process called native compilation on the target) can be painfully slow, sometimes taking hours instead of minutes. Furthermore, the host machine provides a rich development environment with a wide array of tools, large screens, and comfortable peripherals that are simply not available on a resource-constrained embedded target.
A cross-compilation toolchain is more than just the compiler. It is a complete suite of tools necessary for software development. The key components include:
- The Compiler (GCC): The GNU Compiler Collection (GCC) is the core of the toolchain, responsible for translating C, C++, and other languages into assembly and then machine code for the target architecture. A cross-compiler version of GCC will have a name that indicates its target, such as
aarch64-none-linux-gnu-gcc. - Binary Utilities (Binutils): This is a collection of essential tools for working with binary files. It includes the assembler (
as), which converts assembly code into machine code; the linker (ld), which combines multiple object files and libraries into a single executable; and other utilities likeobjdumpandreadelffor inspecting binary files. - The C Library (glibc, musl): A C library provides the standard functions that programs rely on (e.g.,
printf,malloc,fopen). The cross-compilation toolchain must include a version of the C library that has been pre-compiled for the target architecture. When the linker builds your final executable, it links against this target-specific library. The choice of C library (like the standardglibcor the lightweightmusl) is a critical design decision in embedded systems. - The Debugger (GDB): The GNU Debugger (GDB) is a powerful tool for inspecting a program’s state while it is running. The toolchain includes a version of GDB that can run on the host but understand the target’s architecture. This enables remote debugging, where a small
gdbserverprocess runs on the target, communicating with the full GDB client on the host, allowing you to set breakpoints, inspect variables, and step through code from the comfort of your development machine.
As a summary:
The toolchain is often configured with a --sysroot directory. This directory acts as a “virtual” root filesystem for the target system. It contains all the headers and libraries (like the C library, libpthread, libm, etc.) that are available on the target device. When the cross-compiler builds your code, it looks inside this sysroot for the necessary files, rather than using the host machine’s native headers and libraries, which would be incompatible.
VS Code’s Extensible Architecture for Embedded Development
Visual Studio Code is built on a philosophy of being lean and fast at its core, with powerful functionality added through extensions. This architecture makes it exceptionally well-suited for the varied and specific demands of embedded development. Instead of being a monolithic, one-size-fits-all IDE, VS Code can be precisely tailored to any workflow, including C/C++ cross-compilation. This is achieved through a few key configuration files and a cornerstone extension.
The most important extension for our purposes is the Microsoft C/C++ extension (ms-vscode.cpptools). This extension provides the “smarts” for C/C++ development. It powers features like code completion (IntelliSense), code navigation (Go to Definition, Find All References), and debugging integration. However, out of the box, this extension assumes a native compilation environment. It automatically detects the default compiler on your host system (e.g., /usr/bin/gcc) and uses its system include paths to parse your code.
This is where the configuration challenge lies. We must explicitly tell the C/C++ extension to ignore the host’s native compiler and instead use our AArch64 cross-compiler and its associated sysroot. This is the key to making IntelliSense work correctly. If IntelliSense is not aware of the cross-compiler’s paths, it will fail to find standard headers like <iostream> or <stdio.h>, or it might find the host’s incompatible versions, leading to a cascade of spurious errors that make the editor unusable.
This configuration is managed through a JSON file named c_cpp_properties.json, which is stored in a .vscode directory within your project’s workspace. Inside this file, we define a configuration that specifies several critical paths:
compilerPath: This is the most crucial setting. Here, we provide the absolute path to our cross-compiler executable (e.g.,/path/to/toolchain/bin/aarch64-none-linux-gnu-g++). This tells the extension which compiler to query for its default system include paths and defines.includePath: While the extension can infer many paths from the compiler, sometimes we need to explicitly add paths to project-specific or library-specific headers.cStandard/cppStandard: These settings specify the version of the C or C++ language standard to use for parsing the code (e.g.,c17,c++20), ensuring IntelliSense matches the behavior of the compiler.intelliSenseMode: This tells the extension which compiler’s quirks to emulate. For a GCC-based cross-compiler, this would be set to something likelinux-gcc-arm64.
Once IntelliSense is correctly configured, VS Code can provide real-time feedback, highlighting syntax errors, suggesting function arguments, and allowing you to effortlessly navigate a complex codebase. This single feature transforms the development experience from one of guesswork and manual lookups to a fluid and guided process.
Automating the Build: tasks.json
Writing code is only one part of the development cycle. The next step is compiling it. While we can always switch to a terminal and manually invoke our make command or aarch64-none-linux-gnu-g++ compiler, a true IDE integrates this step. In VS Code, this is achieved through the tasks.json file, also located in the .vscode directory.
A task in VS Code is simply a command or script that you want to run. The tasks.json file allows you to define custom tasks and bind them to keyboard shortcuts. For our cross-compilation workflow, we can define a “build” task that executes the exact command needed to compile our code using the cross-compiler. For a simple project, this might be a direct call to g++. For a more complex project, it would typically be a call to make.
The power of this integration is that VS Code can parse the output of the build command. If the compiler reports errors or warnings, VS Code will highlight the corresponding lines in the source code and list them in the “Problems” panel. This allows you to quickly jump from a build error directly to the offending line of code, dramatically shortening the edit-compile-debug loop. You can define multiple tasks, such as a “clean” task to remove old build artifacts and a “build” task to compile the project. These can then be run with a simple key combination (like Ctrl+Shift+B).
Remote Debugging Demystified: launch.json and GDB
The final, and perhaps most powerful, piece of the puzzle is debugging. Debugging an embedded system can be notoriously difficult. The classic approach of inserting printf statements into the code is inefficient and often impractical. A proper source-level debugger is a necessity for any serious development. The GNU toolchain provides the tools for this: the GNU Debugger (GDB) on the host and a small utility called gdbserver on the target.
sequenceDiagram
participant HostPC as Host PC (VS Code + GDB Client)
participant TargetPi as Raspberry Pi 5 (Target App + gdbserver)
Note over HostPC, TargetPi: Prerequisites: App is cross-compiled with -g and copied to Pi.
rect rgb(250, 250, 245)
Note right of TargetPi: 1. Start gdbserver on Target
TargetPi->>TargetPi: user executes: <br> `sudo gdbserver :1234 ./my_app`
Note right of TargetPi: gdbserver starts `my_app`, <br> pauses it at entry, <br> and listens on port 1234.
end
rect rgb(245, 250, 250)
Note left of HostPC: 2. Launch Debugger in VS Code (F5)
HostPC->>HostPC: Reads `launch.json` configuration
Note left of HostPC: `miDebuggerPath` = aarch64-gdb <br> `miDebuggerServerAddress` = PI_IP:1234
HostPC->>TargetPi: Establish TCP connection to gdbserver
end
rect rgb(245, 245, 250)
Note over HostPC, TargetPi: 3. GDB Session Initialization
HostPC->>TargetPi: Send setup commands (e.g., `set sysroot ...`)
HostPC->>TargetPi: Send breakpoint information
TargetPi-->>HostPC: Acknowledge setup and breakpoints
end
rect rgb(250, 245, 245)
Note over HostPC, TargetPi: 4. Interactive Debugging
HostPC->>TargetPi: User clicks 'Continue' (F5)
Note right of TargetPi: `my_app` executes until breakpoint is hit
TargetPi-->>HostPC: Notify: Breakpoint reached!
Note left of HostPC: VS Code UI updates, shows current line, variables, call stack.
HostPC->>TargetPi: User 'Steps Over' (F10)
Note right of TargetPi: `my_app` executes one line of code
TargetPi-->>HostPC: Notify: New program state (updated variables)
Note left of HostPC: VS Code UI updates again.
endThe workflow for remote debugging is as follows:
- The application is compiled on the host using the cross-compiler, with debugging symbols included (the
-gflag for GCC). - The compiled executable is transferred to the target Raspberry Pi 5 (e.g., using
scp). - On the target,
gdbserveris started. It is instructed to launch our application and wait for a GDB client to connect on a specific TCP port (e.g.,gdbserver :1234 ./my_app). Whengdbserverstarts, it immediately stops the application at its entry point, awaiting instructions. - On the host, the cross-platform GDB client (
aarch64-none-linux-gnu-gdb) is launched. It is told the location of the local executable file (so it can read the debug symbols) and instructed to connect to thegdbserverinstance running on the target’s IP address and port.
Once the connection is established, the host GDB has full control over the application running on the target. It can set breakpoints, step through lines of code, inspect and modify variables, and examine the call stack.
VS Code provides a graphical front-end for this entire process through the launch.json file. This file defines “launch configurations.” A launch configuration tells the VS Code debugger how to start a debugging session. For our remote debugging scenario, we create a configuration of type cppdbg. This configuration specifies:
program: The path to the executable file on the host machine. This is essential for VS Code to map the running code back to your source files.miDebuggerPath: The path to the host’s cross-platform GDB client (e.g.,/path/to/toolchain/bin/aarch64-none-linux-gnu-gdb).miDebuggerServerAddress: The IP address and port of thegdbserverrunning on the Raspberry Pi 5 (e.g.,192.168.1.100:1234).sourceFileMap: In some cases, the path to the source code on the build machine might be different from where GDB expects it. This setting allows you to map paths so the debugger can always find the correct source file.setupCommands: These are commands sent to GDB upon connection. A crucial command here isset sysroot /path/to/sysroot, which tells GDB where to find the target’s shared libraries. Without this, GDB cannot debug code that steps into library functions.

With these three files (c_cpp_properties.json, tasks.json, and launch.json) correctly configured, VS Code becomes a command center for embedded development. You can write code with intelligent assistance, compile it with a keystroke, and debug it on the target hardware without ever leaving the comfort of the IDE.
Practical Examples
Theory provides the foundation, but practical application solidifies understanding. This section will guide you step-by-step through setting up a complete VS Code cross-compilation environment for the Raspberry Pi 5. We will start with a basic “Hello, World!” application and then move to a hardware interaction example.
Prerequisites:
- Host Machine: A Linux-based PC (Ubuntu 22.04 LTS is recommended).
- Target Device: A Raspberry Pi 5 running the official Raspberry Pi OS (64-bit).
- Network: Both the host and the Raspberry Pi 5 must be on the same network and able to reach each other. Note the IP address of your Raspberry Pi (
ip addr show). - Cross-Compiler Toolchain: A pre-built AArch64 toolchain. We will use the official Arm GNU Toolchain. Download it from the Arm Developer website and extract it to a known location, for example,
/opt/toolchains/. - VS Code: Installed on your host machine.
1. Initial Setup: Toolchain and VS Code Extensions
First, ensure your toolchain is accessible. Add its bin directory to your system’s PATH for convenience.
# Add to your ~/.bashrc or ~/.zshrc file
export PATH="/opt/toolchains/aarch64-none-linux-gnu/bin:$PATH"
# Verify the installation
aarch64-none-linux-gnu-g++ --version
Next, launch VS Code and install the essential extensions from the Extensions view (Ctrl+Shift+X):
- C/C++: The official Microsoft extension (
ms-vscode.cpptools). This provides the core language intelligence. - C/C++ Extension Pack: (
ms-vscode.cpptools-extension-pack) This bundles the C/C++ extension with other useful tools like CMake tools and a theme.
2. Project 1: “Hello, Embedded World!”
Let’s create a simple C++ project to verify our configuration.
File Structure
Create a new project directory on your host machine.
mkdir rpi5-vscode-hello
cd rpi5-vscode-hello
mkdir .vscode
touch main.cpp
Your initial structure will be:
rpi5-vscode-hello/
├── .vscode/
└── main.cpp
Code Snippet
Populate main.cpp with a simple program.
// main.cpp
#include <iostream>
#include <string>
#include <vector>
int main() {
std::string greeting = "Hello, Embedded World!";
std::cout << greeting << std::endl;
std::cout << "Running on a Raspberry Pi 5." << std::endl;
std::cout << "C++ standard version: " << __cplusplus << std::endl;
return 0;
}
Configuration: c_cpp_properties.json (IntelliSense)
Now, we will configure IntelliSense. Create the file .vscode/c_cpp_properties.json. Use the command C/C++: Edit Configurations (UI) from the command palette (Ctrl+Shift+P) to generate a template, then modify it.
Tip: The
sysrootis the most critical part of the toolchain. It contains the target’s libraries and headers. The path will be inside your extracted toolchain directory, typically under a name likeaarch64-none-linux-gnu.
// .vscode/c_cpp_properties.json
{
"configurations": [
{
"name": "Raspberry Pi 5 GCC",
"includePath": [
"${workspaceFolder}/**"
],
"defines": [],
"compilerPath": "/opt/toolchains/aarch64-none-linux-gnu/bin/aarch64-none-linux-gnu-g++",
"cStandard": "c17",
"cppStandard": "c++17",
"intelliSenseMode": "linux-gcc-arm64",
"compilerArgs": [
"--sysroot=/opt/toolchains/aarch64-none-linux-gnu/aarch64-none-linux-gnu/sysroot"
]
}
],
"version": 4
}
After saving this file, VS Code’s C/C++ extension will re-parse your project. The red squiggles under #include <iostream> should disappear. If you hover over std::cout, you should see its definition, confirming IntelliSense is working correctly.
Configuration: tasks.json (Build Task)
Next, let’s automate the build process. Create the file .vscode/tasks.json. Use the Tasks: Configure Default Build Task command and select “Create tasks.json file from template,” then “Others.”
// .vscode/tasks.json
{
"version": "2.0.0",
"tasks": [
{
"label": "Build for RPi5",
"type": "shell",
"command": "/opt/toolchains/aarch64-none-linux-gnu/bin/aarch64-none-linux-gnu-g++",
"args": [
"-g", // Include debug symbols
"-o",
"${workspaceFolder}/build/hello_rpi",
"${workspaceFolder}/main.cpp",
"--sysroot=/opt/toolchains/aarch64-none-linux-gnu/aarch64-none-linux-gnu/sysroot"
],
"group": {
"kind": "build",
"isDefault": true
},
"problemMatcher": [
"$gcc"
],
"detail": "Cross-compiles main.cpp for Raspberry Pi 5 (AArch64)"
},
{
"label": "Clean",
"type": "shell",
"command": "rm",
"args": [
"-rf",
"${workspaceFolder}/build"
],
"detail": "Removes the build directory"
}
]
}
This file defines two tasks:
- Build for RPi5: This is the default build task (
Ctrl+Shift+B). It invokes our cross-compiler, includes debug symbols (-g), specifies the output file (build/hello_rpi), and points to the source file and sysroot. - Clean: A helper task to remove build artifacts.
Create the build directory (mkdir build) and run the build task by pressing Ctrl+Shift+B. You should see the compiler command run successfully in the terminal pane. Verify the output file’s architecture:
file build/hello_rpi
# Expected output:
# build/hello_rpi: ELF 64-bit LSB executable, ARM aarch64, ...
Configuration: launch.json (Remote Debugging)
This is the final step. We need to deploy our executable to the Pi and set up the debugger.
- Deploy the executable: Use
scpto copy the binary to your Pi. ReplacePI_IPwith your Pi’s IP address.scp build/hello_rpi pi@PI_IP:/home/pi/ - Start
gdbserveron the Pi: SSH into your Raspberry Pi and startgdbserver.# On the Raspberry Pigdbserver :1234 /home/pi/hello_rpiThe terminal will wait, indicating it’s ready for a connection. - Create
launch.jsonin VS Code: Go to the “Run and Debug” view (Ctrl+Shift+D), click “create a launch.json file,” and select “C++ (GDB/LLDB).”
// .vscode/launch.json
{
"version": "0.2.0",
"configurations": [
{
"name": "Debug on RPi5",
"type": "cppdbg",
"request": "launch",
"program": "${workspaceFolder}/build/hello_rpi",
"args": [],
"stopAtEntry": true,
"cwd": "${workspaceFolder}",
"environment": [],
"externalConsole": false,
"MIMode": "gdb",
"miDebuggerPath": "/opt/toolchains/aarch64-none-linux-gnu/bin/aarch64-none-linux-gnu-gdb",
"miDebuggerServerAddress": "PI_IP:1234", // <-- IMPORTANT: Replace PI_IP
"setupCommands": [
{
"description": "Enable pretty-printing for gdb",
"text": "-enable-pretty-printing",
"ignoreFailures": true
},
{
"description": "Set Sysroot for GDB",
"text": "set sysroot /opt/toolchains/aarch64-none-linux-gnu/aarch64-none-linux-gnu/sysroot",
"ignoreFailures": false
}
]
}
]
}
Warning: Ensure you replace
PI_IPwith the actual IP address of your Raspberry Pi. Firewall rules on your host or network may block the connection; ensure the port (1234 in this case) is open.
Now, set a breakpoint in main.cpp by clicking in the gutter to the left of a line number (e.g., the line with std::cout). From the “Run and Debug” view, select “Debug on RPi5” and click the green play button (F5).
VS Code will connect to the gdbserver on the Pi, and execution will pause at your breakpoint. You can now use the debug controls to step over (F10), step into (F11), or continue (F5) execution. You can inspect variables in the “Variables” panel and see the program’s output in the “Debug Console.” You are now remotely debugging your embedded application!
3. Project 2: Hardware Control with libgpiod
Let’s apply this workflow to a hardware project. We will blink an LED connected to a GPIO pin using the libgpiod library, which is the modern, kernel-supported way to control GPIOs.
Hardware Integration
- Component: One standard LED and one 330Ω resistor.
- Connection: Connect the LED’s longer lead (anode) to GPIO 17 (physical pin 11) on the Raspberry Pi 5. Connect the shorter lead (cathode) to one end of the 330Ω resistor. Connect the other end of the resistor to a Ground (GND) pin (e.g., physical pin 9).

Build and Configuration Steps
First, we need the libgpiod development files in our sysroot. On a host system, you would normally install a package like libgpiod-dev. For our cross-compilation sysroot, we must manually obtain these files. The simplest way is to copy them from the target Raspberry Pi.
# On your host machine
# Create directories for the library and headers
mkdir -p sysroot_overlay/usr/lib
mkdir -p sysroot_overlay/usr/include
# Copy the library and header files from the Pi
scp pi@PI_IP:/usr/lib/aarch64-linux-gnu/libgpiod.so.2 sysroot_overlay/usr/lib/
scp pi@PI_IP:/usr/include/gpiod.h sysroot_overlay/usr/include/
We now have the necessary files in a sysroot_overlay directory. We need to update our VS Code configuration to find them.
Code Snippet: blink.cpp
// blink.cpp
#include <gpiod.h>
#include <iostream>
#include <unistd.h>
const char* CHIP_NAME = "gpiochip4"; // GPIO chip for RPi 5
const unsigned int LED_LINE_OFFSET = 17; // GPIO 17
int main() {
struct gpiod_chip *chip;
struct gpiod_line *line;
int ret;
// Open the GPIO chip
chip = gpiod_chip_open_by_name(CHIP_NAME);
if (!chip) {
std::cerr << "Could not open GPIO chip: " << CHIP_NAME << std::endl;
return 1;
}
// Get the GPIO line
line = gpiod_chip_get_line(chip, LED_LINE_OFFSET);
if (!line) {
std::cerr << "Could not get GPIO line: " << LED_LINE_OFFSET << std::endl;
gpiod_chip_close(chip);
return 1;
}
// Request the line as output, with a default value of 0 (off)
ret = gpiod_line_request_output(line, "blink-led", 0);
if (ret < 0) {
std::cerr << "Could not request GPIO line as output" << std::endl;
gpiod_line_release(line);
gpiod_chip_close(chip);
return 1;
}
std::cout << "Blinking LED on GPIO " << LED_LINE_OFFSET << ". Press Ctrl+C to exit." << std::endl;
// Blink loop
for (int i = 0; i < 10; ++i) {
gpiod_line_set_value(line, 1); // LED on
usleep(500000); // 500ms
gpiod_line_set_value(line, 0); // LED off
usleep(500000); // 500ms
}
// Release resources
gpiod_line_release(line);
gpiod_chip_close(chip);
std::cout << "Blinking finished." << std::endl;
return 0;
}
Updated Build Task
We need to modify our tasks.json to link against libgpiod. We also tell the compiler where to find our new headers and libraries.
// .vscode/tasks.json (updated build task)
{
"label": "Build Blink for RPi5",
"type": "shell",
"command": "/opt/toolchains/aarch64-none-linux-gnu/bin/aarch64-none-linux-gnu-g++",
"args": [
"-g",
"-o",
"${workspaceFolder}/build/blink_rpi",
"${workspaceFolder}/blink.cpp",
"--sysroot=/opt/toolchains/aarch64-none-linux-gnu/aarch64-none-linux-gnu/sysroot",
"-I${workspaceFolder}/sysroot_overlay/usr/include", // Path to our custom headers
"-L${workspaceFolder}/sysroot_overlay/usr/lib", // Path to our custom libraries
"-lgpiod" // Link the gpiod library
],
"group": "build",
// ... rest of the task
}
Build the project (Ctrl+Shift+B), deploy the new blink_rpi executable to the Pi using scp, and run it (sudo ./blink_rpi—GPIO access often requires root privileges). You should see the LED blink. You can use the same launch.json setup to remotely debug this hardware-facing code, stepping through the gpiod function calls and observing the results in real-time.
Common Mistakes & Troubleshooting
Transitioning to an IDE-based cross-compilation workflow can be tricky. Here are some common pitfalls and how to resolve them.
Exercises
These exercises are designed to reinforce the concepts of IDE configuration, building, and debugging in a cross-compilation environment.
- Interactive “Hello, World!”:
- Objective: Modify the initial “Hello, World!” project to be interactive.
- Steps:
- Modify
main.cppto prompt the user for their name usingstd::cout. - Read the user’s name into a
std::stringusingstd::cin. - Print a personalized greeting.
- Modify
- Verification: Build, deploy, and run the application on the Raspberry Pi. It should wait for you to type your name and press Enter, then print the greeting. Use the remote debugger to step through the input and output operations.
- Multi-File Project with a Makefile:
- Objective: Refactor the “Hello, World!” project into multiple files and manage the build with a Makefile.
- Steps:
- Create two new files:
greeter.handgreeter.cpp. - In
greeter.h, declare a functionvoid print_greeting(const std::string& name);. - In
greeter.cpp, implement this function. - In
main.cpp, includegreeter.hand call the function. - Create a
Makefilethat defines rules to compilemain.cppandgreeter.cppinto object files and then link them into a final executable namedmulti_hello. - Modify the “Build” task in
tasks.jsonto simply run themakecommand. TheCXXvariable in your Makefile should be set toaarch64-none-linux-gnu-g++.
- Create two new files:
- Verification: The project should build successfully using the VS Code task. Deploy and run
multi_helloon the Pi.
- Cross-Compile and Link a Third-Party Library:
- Objective: Learn to incorporate a pre-built third-party library into your project. We will use
zlib, a common compression library. - Steps:
- Download the
zlibsource code. - Configure and compile
zlibusing your cross-compiler toolchain. This typically involves setting theCCvariable and running./configureandmake. - Install the compiled library into your
sysroot_overlaydirectory. - Write a simple C++ program that uses a
zlibfunction (e.g.,zlibVersion()) and prints the result. - Update your build task in
tasks.jsonto link againstzlib(-lz).
- Download the
- Verification: The program should compile, link, and run on the Pi, printing the
zliblibrary version string.
- Objective: Learn to incorporate a pre-built third-party library into your project. We will use
- Button-Controlled LED:
- Objective: Extend the hardware example to include input, creating a complete interactive circuit.
- Steps:
- Hardware: Add a tactile push-button to your circuit. Connect one pin to GPIO 27 (physical pin 13) and the other pin to a 3.3V source (physical pin 1).
- Code: Modify
blink.cppto:- Configure GPIO 27 as an input with a pull-down resistor using
libgpiod. - Enter a loop that continuously reads the state of the button.
- When the button is pressed (value is 1), turn the LED on. When it’s not pressed, turn the LED off.
- Configure GPIO 27 as an input with a pull-down resistor using
- Verification: Deploy and run the program on the Pi. The LED should light up only when you are pressing the button. Use the debugger to inspect the variable holding the button’s state in real-time.
Summary
- Cross-Compilation is Essential: Developing on a powerful host for a resource-constrained target like the Raspberry Pi 5 is the standard professional workflow.
- VS Code is a Powerful Embedded IDE: Through extensions and configuration files, VS Code can be tailored for a seamless cross-development experience.
- IntelliSense is Key to Productivity: Correctly configuring the C/C++ extension via
c_cpp_properties.jsonto use the cross-compiler’s toolchain and sysroot is critical for accurate code analysis and completion. - Builds Can Be Automated: The
tasks.jsonfile allows you to integrate yourmakeor compiler commands directly into the IDE, parsing errors and streamlining the compile cycle. - Remote Debugging is a Game-Changer: Using
gdb,gdbserver, and thelaunch.jsonfile, you can perform full source-level debugging of code running on the target hardware, drastically reducing troubleshooting time. - The Workflow is Consistent: The process of configuring IntelliSense, build tasks, and the debugger is applicable to a wide range of embedded Linux projects, from simple applications to complex hardware control.
Further Reading
- Visual Studio Code C/C++ Extension Documentation: The official documentation for
ms-vscode.cpptools, covering all configuration options in detail. - Arm GNU Toolchain Downloads and Documentation: The source for official Arm cross-compiler toolchains.
- GDB Documentation – Remote Debugging: The official GNU manual section on how remote debugging with
gdbserverworks. - libgpiod Git Repository and README: The source and primary documentation for the modern Linux GPIO interaction library.
- Makefile Tutorial by Example: A clear, practical guide to writing Makefiles.
- Embedded Artistry Blog: A high-quality blog with articles on professional embedded software development practices.
