
Chapter 37: Cross-Compilation Toolchains: Components and Types
Chapter Objectives
By the end of this chapter, you will be able to:
- Understand the fundamental role of a cross-compilation toolchain in embedded Linux development.
- Identify and describe the core components of a toolchain, including GCC, binutils, and the C library.
- Compare and contrast the characteristics of different C libraries, specifically
glibcandmusl, and evaluate their suitability for different embedded applications. - Differentiate between using a pre-built toolchain and building a custom toolchain from source.
- Successfully use a pre-built AArch64 toolchain to cross-compile a C application for a Raspberry Pi 5.
- Configure and build a basic custom cross-compilation toolchain using a tool like Crosstool-NG.
Introduction
The development environment is rarely the same as the target environment, in the world of embedded systems. Your powerful desktop computer, equipped with gigabytes of RAM and a multi-core processor, is a world away from the resource-constrained System on a Chip (SoC) that will run your final product. This fundamental difference presents a challenge: how do you compile software for a target machine (like a Raspberry Pi 5 with an Arm processor) when your development machine (likely an x86-64 desktop) has a completely different architecture? The answer lies at the heart of professional embedded development: the cross-compilation toolchain.
A cross-compiler is a special compiler that runs on one system architecture but produces executable code for another. It is the bridge that connects your development world to the target’s world. Without it, you would be forced to perform all compilation directly on the embedded device itself—a process known as native compilation. While possible, native compilation on a resource-constrained device is often painfully slow and impractical for large, complex projects like the Linux kernel or a full userspace application suite.
This chapter delves into the architecture and practical application of cross-compilation toolchains. We will dissect the essential components that work in concert to transform human-readable source code into a binary file that the target processor can understand. We will explore the critical role of binutils, the GNU Compiler Collection (GCC), and the C standard library. A significant focus will be placed on understanding the trade-offs between different C library implementations, such as the feature-rich glibc and the lightweight musl, as this choice has profound implications for the size, performance, and portability of your embedded system. Finally, we will walk through the practical decision of whether to use a pre-built, community-provided toolchain for convenience or to undertake the powerful, but more complex, task of building a custom toolchain tailored precisely to your project’s needs. By mastering these concepts, you will gain a foundational skill essential for any serious embedded Linux developer.
Technical Background
To truly appreciate the process of cross-compilation, one must first understand the symphony of tools that work together to create an executable file from source code. A toolchain is not a single program but a suite of interconnected utilities, each with a distinct and vital role. The most prominent components are the GNU Binutils, the GNU Compiler Collection (GCC), and a C Standard Library (like glibc or musl). These are orchestrated to handle everything from initial code processing to the final linking of a runnable program.
The Foundation: GNU Binutils
Before the compiler can even begin its work of translation, a set of foundational tools is needed to handle binary object files. This is the domain of GNU Binutils. This package is a collection of programming tools for the manipulation of object code in various object file formats. While it contains many utilities, the most critical for the compilation process are the assembler (as) and the linker (ld).
The journey from source code to executable begins after the C preprocessor has done its work and the compiler proper has translated the C code into the target architecture’s assembly language. This assembly code, while specific to the target (e.g., AArch64 for the Raspberry Pi 5), is still a human-readable text file. The assembler (as) takes this assembly code as input and translates it into machine code, the raw binary instructions that the CPU executes. The output of the assembler is an object file (typically with a .o extension). This file contains the machine code for the source file it was given, but it is not yet a complete program. It likely contains references to functions or variables defined in other source files or in libraries—these are known as unresolved symbols.
This is where the linker (ld) enters the stage. The linker’s job is to take one or more object files and combine them into a single executable file. It performs several crucial tasks. First, it arranges the code and data sections from all the input object files into a final layout. Second, and most importantly, it resolves the symbolic references between the files. If main.c calls a function defined in utils.c, the linker finds the machine code for that function in utils.o and updates the call instruction in the code from main.o with the final memory address. This process, known as symbol resolution, is what weaves separate modules into a cohesive whole. The linker is also responsible for linking in code from any required libraries, such as the C standard library, which provides essential functions like printf() and malloc(). The final output of the linker is a fully resolved, runnable executable program.
When we talk about a cross-compilation toolchain, these binutils are specially built to understand and produce code for the target architecture. A cross-assembler running on an x86 machine will produce AArch64 machine code, and a cross-linker will know how to piece together AArch64 object files into a valid executable for that platform.
%%{ init: { 'theme': 'base', 'themeVariables': { 'fontFamily': 'Open Sans' } } }%%
graph TD
subgraph "Host Machine (x86-64)"
direction LR
subgraph "Cross-Compilation Toolchain"
direction TB
A[<br><b>C Source Code</b><br><i>hello.c</i>] --> B{"Compiler<br>(aarch64-linux-gnu-gcc)"};
B --> C[<br><b>Target Assembly</b><br><i>hello.s</i>];
C --> D{"Assembler<br>(aarch64-linux-gnu-as)"};
D --> E[<br><b>Target Object File</b><br><i>hello.o</i>];
subgraph "Linking Stage"
E --> F{"Linker<br>(aarch64-linux-gnu-ld)"};
G[<br><b>C Library</b><br><i>libc.so / libc.a</i>] --> F;
end
F --> H((<br><b>Final Executable</b><br><i>For AArch64</i>));
end
end
classDef start fill:#1e3a8a,stroke:#1e3a8a,stroke-width:2px,color:#ffffff;
classDef process fill:#0d9488,stroke:#0d9488,stroke-width:1px,color:#ffffff;
classDef system fill:#8b5cf6,stroke:#8b5cf6,stroke-width:1px,color:#ffffff;
classDef final fill:#10b981,stroke:#10b981,stroke-width:2px,color:#ffffff;
class A start;
class B,D,F process;
class C,E,G system;
class H final;
The Translator: GNU Compiler Collection (GCC)
The GNU Compiler Collection (GCC) is the centerpiece of the toolchain. It is a highly sophisticated suite of compilers for various programming languages, with its C compiler being the de facto standard for open-source development, including the Linux kernel. In a cross-compilation context, GCC is configured to understand the instruction set, register layout, and Application Binary Interface (ABI) of the target architecture.
The compilation process within GCC is itself a multi-stage pipeline. It begins with the preprocessor, which handles directives like #include (pulling in header files) and #define (expanding macros). The result is a single, expanded “translation unit.” This expanded source code is then fed to the compiler front end, which performs lexical analysis, parsing, and semantic analysis to build an internal, language-independent representation of the code called an Abstract Syntax Tree (AST).
This intermediate representation is then passed to the GCC middle end, which performs a vast number of optimizations. These optimizations are architecture-independent and aim to improve the code’s efficiency by, for example, eliminating redundant calculations, unrolling loops, or inlining functions. This is a key area where the power of a modern compiler shines, transforming straightforward C code into highly efficient machine instructions.

Finally, the optimized intermediate code is handed to the compiler back end. The back end is architecture-specific. For our Raspberry Pi 5 target, the AArch64 back end takes over. It maps the intermediate operations to the specific instructions available on an AArch64 processor. It handles register allocation, deciding which variables and intermediate values should be stored in the CPU’s limited set of registers for fastest access. The output of the back end is the assembly code that is then passed to the assembler (as) from binutils.
A cross-compiler, therefore, is a version of GCC where the back end is configured for a different architecture than the one it’s running on. The command for a native compiler might simply be gcc, but for a cross-compiler, it will have a name that identifies the target, such as aarch64-linux-gnu-gcc. This naming convention, known as the target triplet, communicates the architecture (aarch64), the vendor (often omitted or generic), the kernel (linux), and the ABI/C library (gnu).
The Runtime Foundation: The C Standard Library (libc)
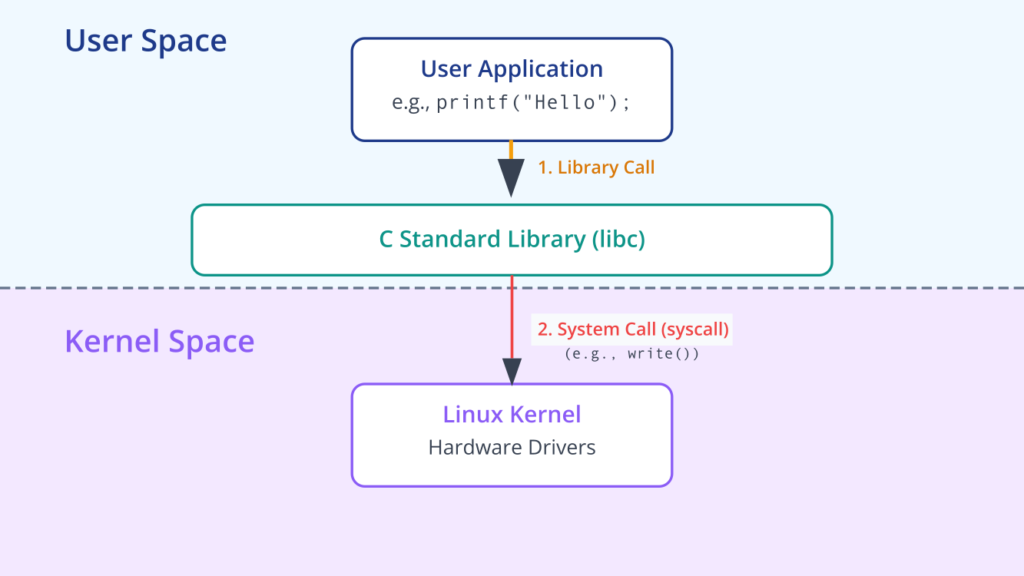
An executable produced by the linker is not entirely self-sufficient. Nearly every C program relies on a standard set of functions for tasks like printing to the console (printf), managing memory (malloc), handling strings (strcpy), and interacting with the operating system (open, read). These functions are provided by the C Standard Library, or libc.
The C library serves as the primary interface between a user-space application and the Linux kernel. When your program wants to open a file, it calls the open() function in libc. The libc implementation of open() then performs the necessary setup and makes a system call into the kernel. The kernel executes the privileged operation and returns the result to libc, which in turn returns it to your application. This abstraction is vital; it provides a stable, standardized API (the POSIX standard) for applications, allowing them to run on any Linux system regardless of the specific kernel version, as long as the kernel supports the required system calls.
In embedded Linux, the choice of C library is a critical design decision with significant trade-offs. The two most dominant choices are the GNU C Library (glibc) and the musl libc.
The Titan: GNU C Library (glibc)
The GNU C Library, or glibc, is the most common libc on desktop and server Linux distributions. Its defining characteristic is its comprehensive feature set. It aims for complete POSIX compliance and includes a wealth of extensions and non-standard functions that have accumulated over decades of development. For example, glibc includes extensive support for internationalization and localization, complex character set conversions, and advanced features like the Name Service Switch (NSS), which allows system databases (like users and hostnames) to be looked up from various sources like files or network services.
However, this richness comes at a cost. glibc is large. The library files themselves can consume several megabytes of storage space, which can be a significant portion of the available flash on a small embedded device. Its complexity can also lead to a larger memory footprint at runtime. Historically, it has also been criticized for being difficult to build for cross-compilation environments, though this has improved over time. For many embedded systems, particularly those with ample resources like the Raspberry Pi 5, glibc is a perfectly valid choice, especially if desktop compatibility and a rich feature set are priorities. The gnu part of the aarch64-linux-gnu- triplet specifically refers to a toolchain built to link against glibc.
The Challenger: musl libc
In contrast to glibc, musl libc is a C library designed from the ground up with the needs of embedded systems and static linking in mind. Its core design philosophies are correctness, simplicity, and small size.
musl‘s primary advantage is its lightweight nature. It is significantly smaller than glibc, both on disk and in memory. This makes it an excellent choice for resource-constrained devices where every kilobyte matters. It is also designed for efficient static linking. When you statically link an application, a copy of all required library code is embedded directly into your executable. This creates a self-contained binary with no external dependencies, which can simplify deployment. musl‘s clean and simple design results in much smaller statically linked binaries compared to glibc.

musl strives for strict POSIX compliance and avoids the “feature creep” of glibc. While it provides all the standard functions you would expect, it omits many of the GNU extensions. This can be a double-edged sword. On one hand, it encourages writing more portable code that doesn’t rely on non-standard behavior. On the other hand, some large, complex applications that were written with glibc in mind may fail to compile or run correctly with musl without modification. A toolchain built for musl might have a triplet like aarch64-linux-musl-gcc.
Pre-built vs. Custom Toolchains
With an understanding of the components, the final piece of the puzzle is deciding where to get your toolchain. You have two main paths: using a pre-built toolchain or building your own.
A pre-built toolchain is a ready-to-use package provided by a third party, such as Arm, Linaro, or Bootlin. The primary advantage is convenience. You can download an archive, extract it, add its bin directory to your system’s PATH, and begin cross-compiling immediately. This saves a significant amount of time and effort, as building a toolchain from source can be a lengthy and complex process. These toolchains are generally well-tested and reliable. However, you are limited to the configuration choices made by the provider. The toolchain will be built for a specific version of GCC, binutils, libc, and the Linux kernel headers. If your project requires a very specific component version or a unique configuration (e.g., enabling or disabling certain compiler features), a pre-built toolchain may not suffice.
Building a custom toolchain gives you ultimate control. Using a dedicated toolchain-building utility like Crosstool-NG or by leveraging a full-scale build system like Yocto or Buildroot, you can specify the exact version of every component. You can tailor the compiler optimizations for your specific processor, configure the C library with only the features you need, and ensure perfect alignment with your target’s Linux kernel version. This is the professional standard for product development, as it ensures reproducibility and allows for deep optimization. The cost is complexity and time. The initial setup is more involved, and the build process itself can take anywhere from 30 minutes to several hours, depending on the host machine’s performance. For this chapter, we will focus on Crosstool-NG as a dedicated tool for this task. It provides a menu-based configuration system, similar to the Linux kernel’s menuconfig, which simplifies the process of defining your custom toolchain.
%%{ init: { 'theme': 'base', 'themeVariables': { 'fontFamily': 'Open Sans' } } }%%
graph TD
A(<b>Start:</b><br>I need a cross-compiler) --> B{Do I need a specific<br>GCC, binutils, or libc version?};
B -- "Yes" --> C{"Does my project require<br>special configuration flags<br>(e.g., disable features, add patches)?"};
B -- "No" --> D{"Is a pre-built toolchain available<br>for my exact target architecture<br>and C library (e.g., from Arm/Bootlin)?"};
C -- "Yes" --> E["Use a <b>Custom Toolchain</b><br>(Crosstool-NG / Yocto / Buildroot)<br><i>You need maximum control.</i>"];
C -- "No" --> D;
D -- "Yes" --> F[Use a <b>Pre-built Toolchain</b><br><i>This is the fastest and easiest path.</i>];
D -- "No" --> G{Am I willing to invest time<br>in configuration and a long build process?};
G -- "Yes" --> E;
G -- "No" --> H[<b>Re-evaluate Project Needs.</b><br><i>Can you align your project with an<br>available pre-built toolchain?</i>];
classDef start fill:#1e3a8a,stroke:#1e3a8a,stroke-width:2px,color:#ffffff;
classDef decision fill:#f59e0b,stroke:#f59e0b,stroke-width:1px,color:#ffffff;
classDef success fill:#10b981,stroke:#10b981,stroke-width:2px,color:#ffffff;
classDef process fill:#0d9488,stroke:#0d9488,stroke-width:1px,color:#ffffff;
classDef caution fill:#eab308,stroke:#eab308,stroke-width:1px,color:#1f2937;
class A start;
class B,C,D,G decision;
class E,F success;
class H caution;
Practical Examples
Theory provides the foundation, but true understanding comes from hands-on practice. In this section, we will walk through the concrete steps of using both a pre-built toolchain and building a custom one to compile a simple C application for the Raspberry Pi 5.
Our target system is a Raspberry Pi 5, which uses an Arm Cortex-A76 processor, an implementation of the AArch64 (or ARMv8-A) architecture. Therefore, we need a toolchain that targets aarch64. Our development host is assumed to be a standard x86-64 Linux distribution (like Ubuntu or Debian).
Example 1: Using a Pre-built Arm Toolchain
For our first example, we’ll use a pre-built toolchain provided by Arm. This is often the quickest way to get started.
Step 1: Download and Extract the Toolchain
First, navigate to the Arm developer website’s GNU toolchain section. We are looking for the “AArch64 bare-metal target (aarch64-none-elf)” or, more appropriately for Linux, the “AArch64 GNU/Linux target (aarch64-linux-gnu)”. For Linux application development, the latter is correct.
Let’s download a recent version. You can typically do this with wget.
# Create a directory for our toolchains
mkdir -p ~/toolchains
cd ~/toolchains
# Download a recent Arm toolchain for AArch64 GNU/Linux targets
# Note: The exact URL and version may change. Check the Arm developer website.
wget https://developer.arm.com/-/media/Files/downloads/gnu/11.2-2022.02/binrel/gcc-arm-11.2-2022.02-x86_64-aarch64-none-linux-gnu.tar.xz
# Extract the archive
tar -xf gcc-arm-11.2-2022.02-x86_64-aarch64-none-linux-gnu.tar.xz
Step 2: Configure the Environment
After extraction, you will have a new directory. To use the toolchain, you need to add its bin subdirectory to your shell’s PATH variable.
# List the contents to see the toolchain directory
ls
# Expected output: gcc-arm-11.2-2022.02-x86_64-aarch64-none-linux-gnu
# Add the toolchain's bin directory to the PATH for the current session
export PATH=~/toolchains/gcc-arm-11.2-2022.02-x86_64-aarch64-none-linux-gnu/bin:$PATH
# To make this permanent, add the line above to your ~/.bashrc or ~/.zshrc file
Tip: After modifying your
PATH, you can verify that the shell can find the cross-compiler by using thewhichcommand and checking its version.
which aarch64-none-linux-gnu-gcc
# Expected output: /home/your_user/toolchains/gcc-arm-11.2-2022.02-x86_64-aarch64-none-linux-gnu/bin/aarch64-none-linux-gnu-gcc
aarch64-none-linux-gnu-gcc --version
# Expected output: aarch64-none-linux-gnu-gcc (GNU Toolchain for the A-profile Architecture 11.2-2022.02) 11.2.1 20220111
Step 3: Create and Compile a C Application
Now, let’s write a classic “Hello, World!” program.
# Create a project directory
mkdir ~/pi5_hello
cd ~/pi5_hello
# Create a C source file
nano hello.c
Inside hello.c, add the following code:
// hello.c
#include <stdio.h>
#include <unistd.h>
int main() {
printf("Hello from the Raspberry Pi 5! This is a cross-compiled application.\n");
printf("My process ID is: %d\n", getpid());
return 0;
}
Now, use the cross-compiler to build the application. The command is the same as using a native gcc, but you must use the full name of the cross-compiler.
aarch64-none-linux-gnu-gcc -o hello_pi5 hello.c
This command tells the compiler to create an output file (-o) named hello_pi5 from the source file hello.c.
Step 4: Verify the Executable
How can we be sure this is an AArch64 executable and not one for our host machine? The file utility is perfect for this.
file hello_pi5
# Expected output:
# hello_pi5: ELF 64-bit LSB executable, ARM aarch64, version 1 (SYSV), dynamically linked,
# interpreter /lib/ld-linux-aarch64.so.1, for GNU/Linux 3.7.0,
# with debug_info, not stripped
The output clearly states “ARM aarch64”, confirming we have successfully cross-compiled our program. If you tried to run this on your x86-64 host (./hello_pi5), you would get an “Exec format error”.
To run this, you would transfer the hello_pi5 binary to your Raspberry Pi 5 (using scp or a USB drive), make it executable (chmod +x hello_pi5), and run it there.
Example 2: Building a Custom Toolchain with Crosstool-NG
Using a pre-built toolchain is easy, but what if you need a musl-based toolchain, or a different GCC version? This is where building a custom toolchain becomes necessary. We will use Crosstool-NG for this.
Step 1: Install Crosstool-NG and Dependencies
Crosstool-NG has its own set of dependencies. On a Debian/Ubuntu system, you can install them as follows:
sudo apt update
sudo apt install -y autoconf bison build-essential curl flex gawk gcc gperf help2man \
libncurses5-dev libsdl1.2-dev libtool texinfo unzip
Next, clone the Crosstool-NG repository and build it.
cd ~/toolchains
git clone https://github.com/crosstool-ng/crosstool-ng.git
cd crosstool-ng
./bootstrap
./configure --prefix=${HOME}/.local
make
make install
Tip: Add ~/.local/bin to your PATH to easily run the ct-ng command.
export PATH=~/.local/bin:$PATH
Step 2: Configure the Toolchain
Crosstool-NG provides a list of pre-configured “samples” that serve as excellent starting points. Let’s list the available AArch64 samples.
ct-ng list-samples | grep aarch64
We’ll choose a generic aarch64-unknown-linux-gnu sample and then customize it to use musl.
# Create a directory for our custom toolchain build
mkdir ~/toolchains/custom_aarch64_musl
cd ~/toolchains/custom_aarch64_musl
# Load the base configuration
ct-ng aarch64-unknown-linux-gnu
# Launch the menu-based configuration tool
ct-ng menuconfig
This will open a text-based UI. Use the arrow keys to navigate. Here are the changes we’ll make:
- Target options —>
- C-library —>
- Change
(glibc)to(musl). Selectmusland press Enter.
- Change
- C-library —>
- Paths and misc options —>
- You can change the
Prefix directorywhere the final toolchain will be installed. The default is~/x-tools/${CT_TARGET}. Let’s keep it for now.
- You can change the
Exit menuconfig and save the new configuration when prompted.
%%{ init: { 'theme': 'base', 'themeVariables': { 'fontFamily': 'Open Sans' } } }%%
graph TD
A(<b>Start</b><br>Need a custom toolchain) --> B{Install Dependencies<br><i>build-essential, flex, etc.</i>};
B --> C{Clone & Build Crosstool-NG<br><i>git clone, ./configure, make</i>};
C --> D{Create Build Directory<br><i>mkdir my-toolchain</i>};
D --> E{Load Base Config<br><i>ct-ng aarch64-unknown-linux-gnu</i>};
E --> F{{Customize Configuration<br><i>ct-ng menuconfig</i>}};
F --> G["<br><b>Select Target Options:</b><br>- C-Library (musl / glibc)<br>- GCC Version<br>- Kernel Version"];
G --> H{Save .config & Build<br><i>ct-ng build</i>};
H -- Takes 30-60+ minutes --> I((<b>Success!</b><br>Toolchain ready in<br>~/x-tools/));
subgraph "Key Customization Step"
direction LR
F
G
end
classDef start fill:#1e3a8a,stroke:#1e3a8a,stroke-width:2px,color:#ffffff;
classDef process fill:#0d9488,stroke:#0d9488,stroke-width:1px,color:#ffffff;
classDef decision fill:#f59e0b,stroke:#f59e0b,stroke-width:1px,color:#ffffff;
classDef check fill:#ef4444,stroke:#ef4444,stroke-width:1px,color:#ffffff;
classDef final fill:#10b981,stroke:#10b981,stroke-width:2px,color:#ffffff;
classDef info fill:#8b5cf6,stroke:#8b5cf6,stroke-width:1px,color:#ffffff;
class A start;
class B,C,D,E,H process;
class F decision;
class G info;
class I final;
Step 3: Build the Toolchain
This is the simplest, yet longest, step.
Warning: This process will download several hundred megabytes of source code (GCC, binutils, musl, kernel headers) and will take a significant amount of time to compile. Be patient.
ct-ng build
Go grab a coffee. On a modern multi-core machine, this might take 30-60 minutes. If successful, the final screen will say “Finishing installation”.
Step 4: Use the Custom Toolchain
Your new, custom-built, musl-based toolchain is now located in the prefix directory.
ls ~/x-tools/aarch64-unknown-linux-musl/bin
# You will see a list of tools, including:
# aarch64-unknown-linux-musl-gcc
# aarch64-unknown-linux-musl-ld
# aarch64-unknown-linux-musl-objdump
# ...and many others
Let’s add it to our PATH and re-compile our hello.c application.
export PATH=~/x-tools/aarch64-unknown-linux-musl/bin:$PATH
cd ~/pi5_hello
# Compile with the new toolchain
aarch64-unknown-linux-musl-gcc -static -o hello_pi5_musl_static hello.c
Here, we’ve added the -static flag. This tells the linker to embed all necessary musl library code directly into our executable. This is a common practice with musl to create dependency-free binaries.
Now, let’s verify the result and compare its size to the dynamically linked glibc version.
file hello_pi5_musl_static
# Expected output:
# hello_pi5_musl_static: ELF 64-bit LSB executable, ARM aarch64, version 1 (SYSV),
# statically linked, with debug_info, not stripped
ls -lh hello_pi5*
# Expected output might look like this:
# -rwxr-xr-x 1 user user 17K Jul 08 22:10 hello_pi5
# -rwxr-xr-x 1 user user 820K Jul 08 22:30 hello_pi5_musl_static
Notice two things: the file output confirms it is “statically linked”, and its size is much larger. This is expected; the glibc version is small because it relies on the libc.so.6 library file already present on the target system, whereas our musl version contains the entire library code it needs. The trade-off is a larger file for a completely self-contained application.
Common Mistakes & Troubleshooting
Building and using cross-compilation toolchains can be fraught with subtle errors. Here are some of the most common pitfalls and how to resolve them.
Exercises
- Simple Compilation:
- Objective: Reinforce the basic cross-compilation workflow.
- Task: Write a C program that calculates and prints the 15th number in the Fibonacci sequence. Compile it using the pre-built
aarch64-none-linux-gnu-gcctoolchain. - Verification: Use the
filecommand to confirm the binary is for AArch64. Transfer it to your Raspberry Pi 5 and run it to see the correct output (the 15th Fibonacci number is 610).
- Linking with an External Library:
- Objective: Understand how the cross-compiler links against libraries.
- Task: Write a C program that uses the
mathlibrary. The program should calculate the square root of 1024. You will need to include<math.h>and link with the math library by adding the-lmflag to your compilation command. - Command:
aarch64-none-linux-gnu-gcc -o sqrt_test sqrt_test.c -lm - Verification: Run the program on the Raspberry Pi 5 and verify that it prints
32.0.
- Build a
glibc-based Custom Toolchain:- Objective: Practice using Crosstool-NG with a different configuration.
- Task: Using Crosstool-NG, build a new custom toolchain. This time, do not change the C library from the default
glibc. Configure it and build it. - Verification: Use your new
glibc-based toolchain to compile the “Hello, World!” application dynamically. Usels -lhto compare the size of this binary to the statically linkedmuslversion from the example. Note how much smaller the dynamically linkedglibcversion is.
- Investigating Binary Dependencies:
- Objective: Learn how to inspect the dynamic library dependencies of an executable.
- Task: Take the dynamically compiled “Hello, World!” program from Exercise 3. Use the cross-toolchain’s
objdumporreadelfutility to inspect its dependencies. - Command:
aarch64-unknown-linux-gnu-readelf -d hello_pi5_glibc - Verification: Look for the
(NEEDED)entries in the output. You should see a dependency on the C library (e.g.,libm.so.6,libc.so.6) and the dynamic linker (ld-linux-aarch64.so.1). This shows what files the executable expects to find on the target system.
%%{ init: { 'theme': 'base', 'themeVariables': { 'fontFamily': 'Open Sans' } } }%%
sequenceDiagram
participant Dev as Developer (Host PC)
participant Tool as aarch64-readelf
participant Exec as hello_pi5_glibc
participant Target as Target Pi 5
Dev->>+Tool: Run command:<br>readelf -d hello_pi5_glibc
Tool->>+Exec: Read ELF Header & Dynamic Section
Exec-->>-Tool: Return section contents
Tool-->>-Dev: Display Dynamic Section Info
Note over Dev,Tool: Developer inspects the output for<br>'(NEEDED)' entries.
Dev->>Dev: Finds:<br>1. Shared library: libc.so.6<br>2. Shared library: libm.so.6<br>3. Dynamic linker: ld-linux-aarch64.so.1
Dev->>+Target: Later, when running ./hello_pi5_glibc...
Target->>Target: Dynamic Linker searches for<br>libc.so.6 and libm.so.6
alt Files Found
Target-->>Dev: Program runs successfully!
else Files NOT Found (e.g., on a musl system)
Target-->>Dev: Error: "file not found" or "error loading shared libraries"
end
Summary
- Cross-Compilation is Essential: It allows developers to compile code on a powerful host machine for a different, often resource-constrained, target architecture.
- A Toolchain is a Suite of Tools: The core components are
binutils(assembler, linker), GCC (compiler), and a C Standard Library (libc). - The C Library is a Critical Choice:
glibcis feature-rich and common on desktops but is large.muslis lightweight, modern, and excellent for static linking and resource-constrained systems, but lacks GNU extensions. - Toolchain Naming is Informative: The target triplet (e.g.,
aarch64-linux-gnu) tells you the architecture, kernel, and C library/ABI. - Pre-built vs. Custom: Pre-built toolchains offer convenience and speed, while building a custom toolchain with tools like Crosstool-NG provides complete control over component versions and configuration.
- Verification is Key: Always use the
filecommand to verify the architecture of your compiled binaries andldd(orreadelf) to inspect dynamic dependencies.
Further Reading
- GCC, the GNU Compiler Collection: Official documentation from the GNU Project. The ultimate reference for compiler options and internals. https://gcc.gnu.org/onlinedocs/
- GNU Binutils: Official documentation for the assembler, linker, and other binary tools. https://www.gnu.org/software/binutils/manual/
- The GNU C Library (glibc) Manual: The definitive guide to all functions and features available in
glibc. https://www.gnu.org/software/libc/manual/ - musl libc Homepage: Official website for
musl, including a functional differences wiki comparing it toglibc. https://musl.libc.org/ - Crosstool-NG Documentation: The official documentation for the tool used to build custom toolchains. https://crosstool-ng.github.io/docs/
- Arm Developer Portal: A primary source for pre-built GNU toolchains for Arm architectures. https://developer.arm.com/tools-and-software/open-source-software/developer-tools/gnu-toolchain
- Bootlin Toolchain Downloads: A well-regarded embedded Linux company that provides a variety of excellent, pre-built cross-compilation toolchains. https://toolchains.bootlin.com/
